Mobile ALOHA: Revolutionizing Robotics with Low-Cost, Whole-Body Teleoperation
Introduction
The Mobile ALOHA project, developed by a team at Stanford University in collaboration with the Boston Dynamics AI Institute, represents a significant leap in robotics. It addresses the limitations of traditional table-top manipulation systems by introducing a low-cost, whole-body teleoperation system capable of performing complex mobile manipulation tasks. This article explores the hardware design, software algorithms, and real-world applications of Mobile ALOHA, highlighting its potential to transform robotics in domestic and industrial settings18.
Hardware Design
Mobile ALOHA combines a modular, bimanual robot with a mobile base, enabling it to perform tasks requiring both mobility and dexterity. Key components include:
- Bimanual Robot: The system uses the ALOHA robot, which features two 6-degree-of-freedom arms with parallel grippers. These arms are designed for flexibility and ease of maintenance, making them ideal for complex tasks like cooking and cleaning48.
- Mobile Base: The robot is mounted on a Mecanum wheel base, allowing it to move at human walking speeds (approximately 1.42 m/s). This base provides stability and maneuverability, enabling the robot to navigate indoor environments effectively811.
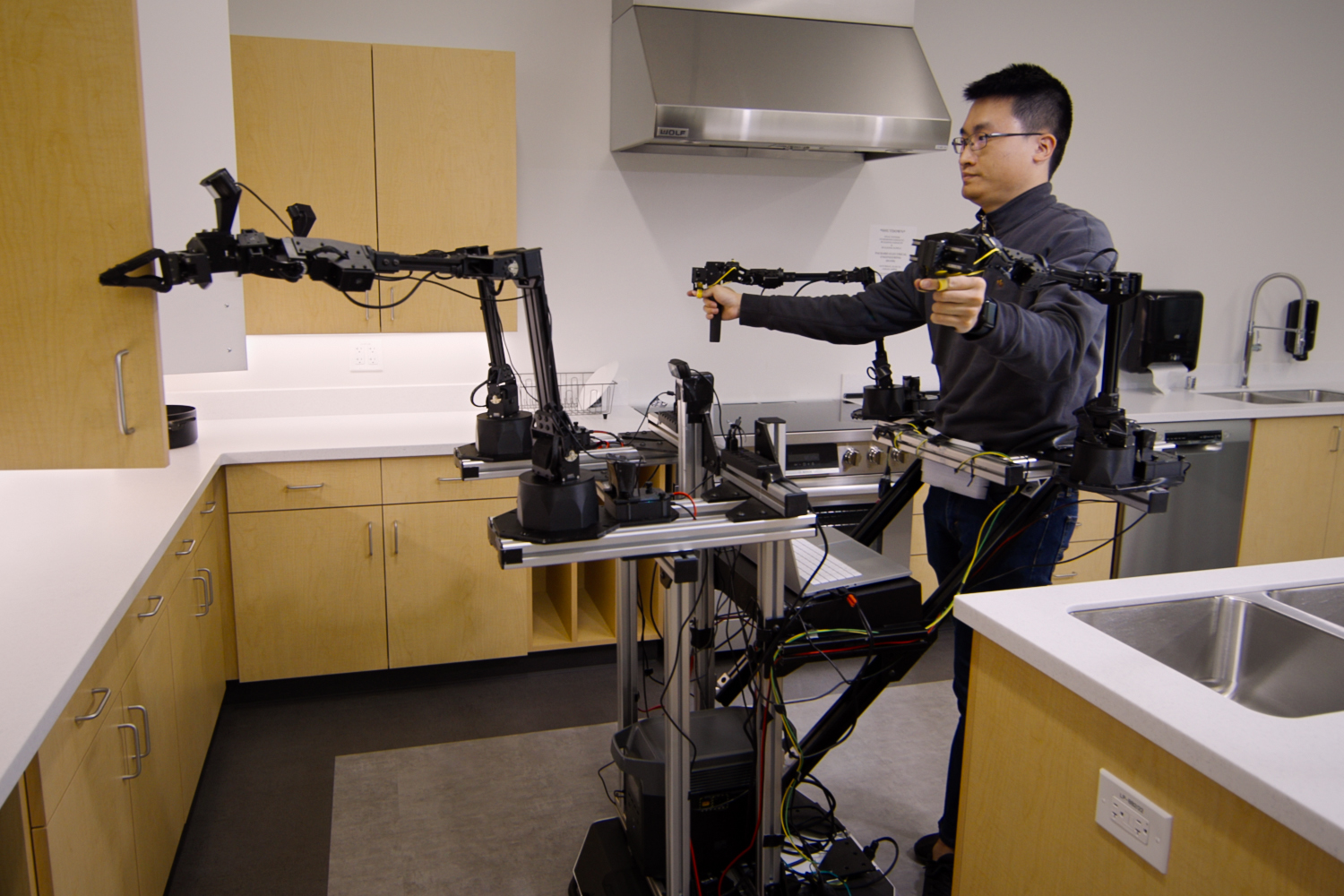
- Teleoperation Interface: A unique feature of Mobile ALOHA is its whole-body teleoperation system. Operators wear a harness connected to the robot’s base, allowing them to control the robot’s movement and arm actions simultaneously. This intuitive interface ensures high-quality data collection for imitation learning18.
- Onboard Computing and Sensors: The system is equipped with a high-performance computer (NVIDIA RTX 3070Ti) and multiple cameras, including wrist and overhead cameras, to capture visual data during operations811.
Software and Algorithms
Mobile ALOHA leverages advanced imitation learning algorithms to perform complex tasks. Key aspects include:
- Behavior Cloning: The system uses supervised learning to mimic human demonstrations. By co-training with existing static ALOHA datasets, Mobile ALOHA achieves a 90% success rate in tasks like cooking and opening cabinets18.
- ACT (Action Chunking with Transformers): This algorithm enables the robot to learn from short demonstrations (as little as 15 minutes) and generalize to new tasks. ACT’s transformer-based architecture allows it to handle high-dimensional data efficiently810.
- Co-Training: Combining data from static and mobile tasks enhances the robot’s performance. For example, Mobile ALOHA can autonomously sauté shrimp, store heavy pots, and even call and enter an elevator111.
Real-World Applications
Mobile ALOHA has demonstrated its versatility in various scenarios:
- Household Tasks: The robot can perform complex chores like cooking, cleaning, and organizing. For instance, it can sauté shrimp, rinse pans, and store heavy pots in cabinets18.
- Office Assistance: Mobile ALOHA can navigate office environments, interact with elevators, and assist with tasks like delivering items or organizing workspaces11.
- Industrial Use: Its low cost (approximately $32,000) and modular design make it suitable for industrial applications, such as warehouse logistics and assembly line tasks811.
Challenges and Future Directions
While Mobile ALOHA has achieved remarkable success, challenges remain:
- Generalization: The system currently requires task-specific demonstrations. Future work aims to improve its ability to generalize across tasks with minimal additional training18.
- Robustness: Enhancing the robot’s ability to handle dynamic and unstructured environments is a key focus area11.
- Cost Reduction: Further reducing the system’s cost will make it more accessible for widespread adoption8.
Conclusion
Mobile ALOHA represents a groundbreaking advancement in robotics, combining low-cost hardware with cutting-edge imitation learning algorithms. Its ability to perform complex, mobile manipulation tasks opens up new possibilities for robotics in domestic, industrial, and commercial settings. As research continues, Mobile ALOHA is poised to become a cornerstone of next-generation robotic systems
Hi, this is a comment.
To get started with moderating, editing, and deleting comments, please visit the Comments screen in the dashboard.
Commenter avatars come from Gravatar.